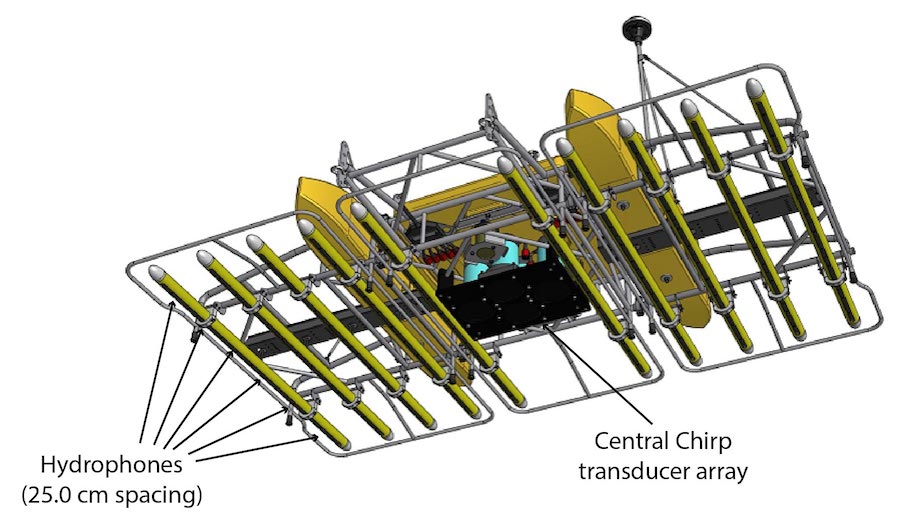
The source waveform for the 3D Chirp is a linear, 16-millisecond Chirp between 1.5 – 13.0 kHz. This is transmitted from an array of four transducers in the centre of the 3D Chirp.
This short sweep is very repeatable and permits shot-rates up to 8 Hz, allowing high fold-of-coverage to be obtained with a single pass and normal tow speed of 3 kn.
Spanning more than 3 octaves, this custom broadband sweep makes decimetre-resolution imaging possible. The autocorrelation Klauder wavelet (bottom left) is zero phase with a peak-side lobe distance of 0.06 ms. Combined with a high-performance navigation system traces can be stacked coherently and clean subsurface reflections and hyperbolae can be interpreted in processed 3D Chirp data.